


























万博ANSYS的博客
2021年1月14日
模拟让自动驾驶汽车看清道路,避开恶劣天气
恶劣的天气条件,如风、雨、雪、雾和灰尘会迅速出现在道路上,并极大地影响我们的感知和驾驶方式。如果天气会影响我们对道路的感知,那么它对高级驾驶辅助系统(ADAS)和自动驾驶汽车(AV)又有什么影响呢?

推出全自动驾驶汽车的一个障碍是对自动驾驶系统的数据收集、目标检测和决策过程实现100%的信心。在各种照明水平和天气条件下,摄像头必须可靠地“看到”行人和其他物理物体,并触发刹车等关键系统的适当反应。在多雨、多雾和多雪的条件下,这一点尤其具有挑战性,因为这些条件会混淆视觉摄像头,也会影响激光雷达、雷达和其他传统传感器技术的性能。事实上,天气条件和相关的传感器污染对传感器性能有直接影响,阻碍了决策的最佳检测。影响可以是:
- 降低了相机的可见度和对比度
- 激光雷达信号的散射、吸收和衰减,以及低质量数据的感知算法和伪结果
- 雷达可以探测到恶劣天气条件下的物体,但不能正确分类
但是,如果在自动驾驶汽车上安装传感器,然后在各种可能的大气条件和各种可能的地形下进行数千英里的道路测试,实际上是不可能的,那么如何才能达到所需的确定性水平呢?仅靠道路测试就能达到100%的信心可能需要数百年的时间。
在恶劣天气下获得良好的ADAS数据
汽车公司可以使用天气实验室等物理测试,在受控环境中创建场景,并在道路上进行测试,以评估天气的影响。天气实验室可以提供可重复的天气数据,但不考虑其他车辆和道路上的动态条件对天气的影响。道路测试将自动驾驶系统暴露在真实的天气条件下,但它不能用于快速的技术开发。
一种有效的替代物理测试的方法是将计算流体动力学(CFD)和光学模拟解决方案相结合。这些解决方案可以帮助自动驾驶汽车制造商快速开发天气感知自动驾驶系统,为不同的天气场景提供基于物理的方法,并在虚拟环境中对传感器和自动驾驶系统进行性能测试。
cfd光学解决方案提供了一种设计和优化传感器等硬件以及控制这些传感器的嵌入式软件的有效方法。因为仿真可以在设计过程的早期进行,所以当大部分设计已经完成时,它可以通过检测后期难以解决的问题来节省时间。
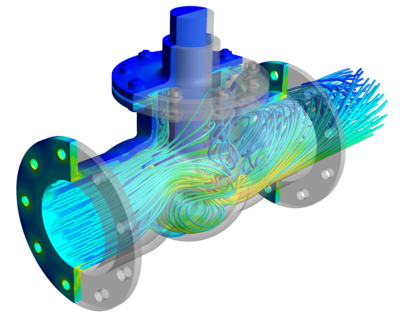
在cfd光学解决方案中,万博Ansys流利用于执行CFD模拟各种天气条件,包括风、雨、雾、雪和灰尘。此外,天气引起的传感器污染、液滴撞击和过渡到膜流、雾和表面凝结、结霜、结冰和除冰现象也可以使用Fluent进行分析。CFD模拟的结果是高保真的,可重复的天气数据生成光学模拟。
CFD还可以帮助分析人员评估天气对光学传感器的影响,并改进其设计、性能、包装和在车辆上的放置。公司可以虚拟地研究传感器布局,寻找最有效的传感器组合,以提高自动驾驶汽车传感器在恶劣天气条件下的性能。他们还可以使用模拟来审查和开发涂层和清洁系统,以增强传感器感知;对感知算法进行信度测试;并进行边缘案例分析。
让我们更深入地研究两个例子:雨和雾。
让雨水洒在相机和激光雷达系统上
比方说,你想在中等降雨条件下评估摄像头和激光雷达的性能。CFD模拟使您能够模拟原雨以及由其他来源产生的水滴,例如轮胎的侧面飞溅,或道路上其他车辆产生的飞溅和水滴。在对降雨条件进行CFD模拟后,从Fluent中导出液滴的位置和大小,并导入到Speos通过3D纹理特征在场景中生成水滴,以便在相机传感器和相关感知算法上测试其影响。
下面是使用CFD生成的降雨数据进行光学模拟的相机图像。

晴朗、小雨及中雨情况(左至右)
在小雨天气中,前方车辆和行人的检测置信度与晴空条件下几乎相同。检测性能下降的主要是左车。置信水平由晴空时的0.87降至小雨时的0.47。在中雨条件下,前车检测置信水平从0.98下降到0.87,侧车和行人检测不可靠(这两个物体的置信水平低于0.2的置信阈值)。
工程师还可以使用Speos的先进相机模型来评估景深的影响。景深导致相机图像中附近的物体模糊,这使得感知算法难以检测到它们。天气强度与景深的结合对感知算法来说是一个挑战。
降雨对激光雷达的结果有影响。雨滴可能导致激光雷达点云中的点分散和缺失。液滴的密度、大小和分布对激光雷达的性能都有重要影响。不同的激光雷达后处理算法,例如使用最后的回报而不是峰值回报,可以用来减轻影响。
靠近激光雷达发射器的外壳上的液滴比空气中的液滴更容易使光偏离。
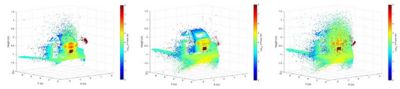
从左至右:小雨、中雨(场区无雨滴)、中雨(场区有雨滴)
要了解更多天气状况对相机和激光雷达的影响,请观看点播网络研讨会:发现不利天气条件模拟.
为自动驾驶汽车传感器清除大雾天气
虽然目前的传感器技术——包括光学摄像机和激光雷达——在雾天条件下还达不到要求,但有一个积极的发展:热成像。由于热传感器可以感知远红外辐射,因此可以揭示温度的差异,这对于在雾和其他视觉模糊的条件下探测人、动物和其他产生热量的物体是有价值的。
在Speos中重建的虚拟驾驶场景中,使用热像仪和不同程度的雾进行了逼真的模拟。结果显示,与可见光(RGB)相机相比,在雾天条件下使用热成像相机时,感知能力有了巨大的提高。这表明,在传统传感器组合中加入热成像可以提高雾天条件下自动驾驶汽车传感器的性能。
cfd光学解决方案可用于制造雾条件,并在这些条件下测试传感器和自主系统的性能。均匀和非均匀(在空间和时间上变化)雾条件都可以使用Fluent进行模拟。来自CFD的雾数据被传输到Speos,以测试可见光相机、热成像相机和激光雷达在这些雾条件下的性能。以下图像显示了在光学模拟中,可见光摄像机和激光雷达所看到的非均匀雾和汽车前面的车辆。
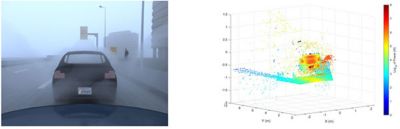
左:可见光摄像头,右:激光雷达
ADAS模拟的晴朗天空
汽车制造商和原始设备制造商可以通过Ansys解决方案将更多的重点放在模拟上,以补充他们的物理天气测试。万博在早期设计阶段使用仿真可以帮助减少自主系统商业化周期的时间和成本。
有效的感知,特别是在恶劣天气条件下,是当今实现自动驾驶汽车100%可靠性的最大挑战之一。耦合cfd -光学解决方案可以帮助分析人员通过开发端到端天气感知解决方案来应对天气条件带来的挑战,包括设计传感器、优化其性能、战略性地将传感器安装在车辆上、设计传感器清洁系统、测试感知算法和执行功能安全分析。
这意味着自动驾驶汽车工程团队可以开始增加并加速他们的测试和验证活动,以完善创新的混合功能传感器设计,从而通过Ansys模拟显著提高车辆的感知能力。万博
看看Ansys能为万博您做些什么
看看Ansys能为万博您做些什么
联系我们
立即联系我们
