-
-
-
Photonique
Aperçu de l'ensemble -
万博Ansys Lumerical CHARGE -
万博Ansys Lumerical CML编译器 -
万博Ansys Lumerical DGTD -
万博Ansys Lumerical FEEM -
万博Ansys Lumerical FDTD -
万博Ansys Lumerical HEAT -
万博Ansys Lumerical INTERCONNECT -
万博Ansys Lumerical MODE -
万博Ansys Lumerical MQW -
万博Ansys Lumerical STACK -
万博Ansys Photonics Verilog-A
-
-


























万博Ansys优势杂志
日期:2020年
自主视线安全
由An万博sys Advantage Staff提供
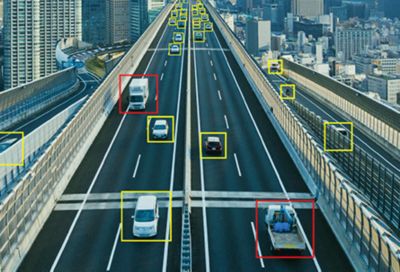
对于部署的自动驾驶汽车(AV)来说,不可能出现意外。在路上或空中,车辆的感知系统必须“理解”它“看到”的每个物体。要做到这一点,它的软件模型必须经过适当的训练。如果没有这种训练,它将无法检测或正确分类它以前没有见过的物体。
举个例子,一个穿着戏服的人过马路:
人类司机虽然很惊讶,但会立即认出这个穿戏服的人,并做出相应的反应。相比之下,感知系统可能无法在逻辑上实现这种关键的飞跃,或者更糟的是,根本无法检测到一个物体。为了确保安全运行,开发人员不仅要训练车辆的基于人工智能的感知算法,还要确保它已经学习了它需要知道的东西。
解决这些和其他安全相关的自动驾驶问题是匹兹堡的边缘案例研究(边缘案例)的使命。Edge Case成立于2014年,最初是卡内基梅隆大学(CMU)研究人员Michael Wagner(首席执行官)和Phil Koopman教授(首席技术官)的合作,他们共同致力于从一开始就将安全性构建到自动系统中。该公司的软件产品和服务解决了最复杂的机器学习挑万博网战和嵌入式软件问题。Edge Case与全球原始设备制造商(oem)、高级驾驶辅助系统(ADAS)供应商、4级以上自动驾驶开发者、车辆运营商和保险公司合作,帮助客户将安全、可靠的产品推向市场。万博网
瓦格纳说:“当我们看到自动驾驶从大学的研究实验室走向道路、天空和医院时,我们意识到,我们有一个绝佳的机会,可以让自动驾驶更安全、更值得我们信任。”
该公司的名字恰如其分地描述了它的业务。在自动驾驶和机器人的安全领域,边缘案例代表着罕见的、潜在的危险场景,也是edge Case产品开发的重点。Switchboard是该公司的初始产品,它使用压力测试来自动化和加速软件缺陷的发现和修复。自Edge Case问世以来,Switchboard一直是美国陆军通过自主平台提高士兵安全和提高战术能力的重要组成部分。很快,该公司就与其他国防和自主技术公司建立了合作关系,包括洛克希德·马丁公司。Switchboard还充当了与匹兹堡邻居和即将成为合作伙伴的Ansys的重要对话启动器。万博
Edge Case的第二项创新Hologram于2018年被构想为一种鲁棒性测试引擎,用于检测感知系统的弱点。此外,作为2019年OEM协议的结果,它还支持Ansys SCADE Vision,这是Ansys嵌入式软件产品系列的万博一部分。

万博由全息图驱动的Ansys SCADE Vision加快了发现AV嵌入式感知软件中可能与边缘情况相关的弱点的速度。

在这四幅图像系列中,拖车最初被正确识别,但进一步的分析表明它可能是漏检。
神经网络中的Av场景背后
在自动驾驶汽车中,感知是控制操作的许多相互依赖的系统之一,例如运动预测、规划和控制。除了感知之外,开发人员已经有了很好理解的、公认的方法来确保这些系统的安全性。
感知开发人员通常使用驱动-查找-修复方法。检测缺陷需要查看感知算法的输出,并将其与注释的“地面真相”对象数据进行比较。例如,如果算法无法检测到行人,这个过程将是重新训练,重新测试,并(可能)重复。
“看着这种颠覆性的自动驾驶技术从我们周围的实验室出现,我们意识到这是一个让自动驾驶更安全、更值得公众信任的绝佳机会。”
-菲尔·库普曼博士,前沿案例研究
这种方法对于开发是足够的,但是对于保证安全是不够的。首先,地面实况数据必须手动标记-每个视频帧中的每个对象。这不仅非常耗时,而且昂贵得令人发指。其次,如果检测到差异,分析也不会确定缺陷的来源或发生原因。SCADE Vision不仅解决了这些问题,还提供了一种工具来验证更大的自治系统内部的感知。
感知系统的核心是一组传感器和一个卷积神经网络(CNN)。该网络将数百甚至数千个基于软件的神经元(单个处理单元)连接在一系列相互连接的层中。当处理来自测试车辆的相机传感器数据时,输入层中的神经元捕获并为图像中的每个像素分配数值。通过这种方式,CNN将图像“视为”像素值的数组。
这些值通过类似过滤器的层,该层通过一系列代数和矩阵操作处理每个像素。每一层的决策函数都有效地筛选不同的对象特征——直边或曲线边、颜色、纹理、强度模式等。根据处理像素时做出的分类“决定”,输出层识别对象的存在。它生成对象列表,并围绕行人、停车标志、汽车等绘制相应的边界框。
与传统的软件系统不同,神经网络就像一个黑盒:很难或不可能知道它是如何做出每个决定的。边缘案例创建全息图正是出于这个原因。管理感知系统的安全性与验证基于规则的计划或控制系统有很大的不同。瓦格纳说:“真的没有任何检测行人的规则,这就是为什么处理感知系统的安全性与验证基于规则的规划或控制系统如此不同。神经网络是根据训练数据构建的。”
一个恰当的例子:一个物体检测系统,在城市街道上反复正确地识别行人,却未能检测到建筑工地的工人。为什么?因为在工人的霓虹灯黄色背心的培训数据中没有参考。具有讽刺意味的是,高能见度背心导致工人消失。

万博由全息图驱动的Ansys SCADE Vision可以回顾过去,识别仅靠实时监控无法检测到的边缘情况,从而深入了解神经网络的“黑箱”。
分析原始、未标记的数据
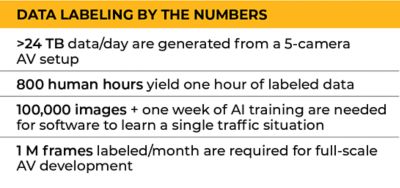
在数百万英里的道路上,测试车辆收集了pb,甚至eb的数据,其中只有一小部分将用于物体检测训练。这是因为必须首先对数据进行标记。注释专家必须在视频的每一帧周围画一个框,并标记每个物体,这样CNN才能知道“这是一个行人,这是一辆汽车”。仅一小时的驾驶录像就需要大约800个小时的人力资源,这是一项耗费资源、容易出错的任务。
由全息图驱动的SCADE Vision不需要标记数据来识别神经网络中的脆弱性。一旦感知算法得到了“令人满意”的训练,SCADE Vision的自动分析就会通过神经网络(称为待测系统或SUT)运行原始视频片段。然后它修改了视频场景,非常轻微。图像可能会被模糊或锐化,但不会到人类无法识别被改变的物体的程度。SCADE Vision再次通过SUT运行修改后的帧,并逐帧比较修改后的结果和基线结果。
Edge Case Research的产品经理Eben Myers表示,SCADE Vision自动化分析的核心在于对两组物体检测进行比较。这就是软件引擎检测边缘情况并将未标记的测试数据减少到值得进一步研究的视频帧的一个显著较小的子集的地方。
虽然检测之间的小干扰是预期的,但较大的干扰(弱检测)是SUT(假阴性)中潜在错误的预测。微弱的物体检测信号表明,软件大脑正在努力做出积极的识别,并做出最佳猜测的决定。另一方面,假阴性表明漏检,即实际失败。
SCADE视觉输出这些结果在两个相应的显示器。行程段(视频数据的连续帧)的图表将基线检测显示为灰色条,弱检测显示为橙色,假阴性显示为红色。并且,在每一帧中,类似颜色(加上基线检测的绿色)的包围框围绕SUT检测到或遗漏的对象。
与实时分析相比,分析人员可以从SCADE Vision中获得更多信息,因为它可以智能地揭示过去和未来的目标检测。例如,当物体进入场景时,一个边界框在几帧内闪烁橙色,然后变成(并保持)绿色,警告分析人员SUT由于某种原因混淆了。如果没有这种回顾,分析人员将无法知道绿框对象被不一致地检测到。
SCADE Vision还可以发现系统错误(相对于一次性错误)。例如,在几个场景中出现的停止标志,成为弱检测,然后在再次出现和重复模式之前消失。这种检测错误可能是由一个或多个触发条件引起的——环境、根本原因因素,如眩光、低对比度、嘈杂的背景(树上的叶子)等。SCADE Vision提供了用于识别这些触发条件的分析工具,当这些触发条件与SUT中的弱点结合在一起时,就会产生软件可以标记的不安全行为类型。
使用这些工具,分析人员可以向对象数据添加描述可疑触发条件的描述性标签,并帮助揭示检测缺陷模式。分析人员可以使用标记过程的输出执行预期功能安全性(SOTIF)规定的定量分析,或者对未标记数据中的“感兴趣的对象”进行额外测试。通过“指向”这些物体,SCADE Vision允许分析人员进行场景测试,例如,是否始终检测到绿叶树前的停车标志。这个过程提供了对疑似系统弱点的更深入的了解,并促进了算法的再训练。
扩大Av开发
SCADE Vision由Edge Case Research的全息图提供支持,为开发自主技术的客户提供可扩展性,并与其他Ansys软件集成。万博可配合Ansys medini分析,发现并跟万博踪已识别的触发条件。并且,当与Ansys VRXPERIENCE和Ansys optiSL万博ang一起使用时,它可以在非常多的场景变量上自动化SUT的健壮性测试。SCADE Vision还将与Ansys Cloud和高性能计算(HPC)结合使用,以加速大规模边缘情万博况的检测。
Edge Case和Ansys在感知领域展开合作,继续加快全自动驾驶汽车安全、广泛部署的时间表。万博
SCADE Vision的边缘案例检测能力正在推进感知算法的发展,同时在检测发现方面(相对于人工数据分析)加速了30倍。更重要的是,SCADE Vision可以扩展到汽车以外的行业——采矿、航空航天和国防、工业机器人或任何依赖于基于人工智能的视觉和感知软件的应用程序。
Découvrez ce qu'万博Ansys peut faire pour vous
Découvrez ce qu'万博Ansys peut faire pour vous
联系我们
Contactez-nous今天
